-
Mail us
sale@tiger-transformer.com -
Phone us
(+86)15155183777 -



Mail us
sale@tiger-transformer.comPhone us
(+86)15155183777
A stepping motor is a motor that converts electrical pulse signals into corresponding angular or linear displacements.
Every time a pulse signal is input, the rotor rotates an angle or advances one step, the output angular displacement or linear displacement is proportional to the number of input pulses, and the rotational speed is proportional to the pulse frequency. Therefore, stepper motors are also called pulse motors.
Types of stepper motors: permanent magnet, reactive, hybrid.
Permanent magnet type: large step angle (disadvantage)
Reaction type: small torque (disadvantage)
Hybrid type: combines the advantages of the above two , the step angle is small, and the torque is large.
All in all, we still have to choose according to the needs of the actual situation. For example, after adding a reduction ratio to the permanent magnet type, I think the accuracy is still acceptable.
Permanent magnet stepper motor specification approval bookend parameters:
Model: 24BYJ28
"24" refers to the maximum outer diameter of the motor is 24mm.
The "B" refers to the stepper motor.
The "Y" refers to a permanent magnet motor.
"J" refers to the geared motor.
"2" means 2 phases, that is, there are 4 coils.
"8" indicates the number of pole pairs;
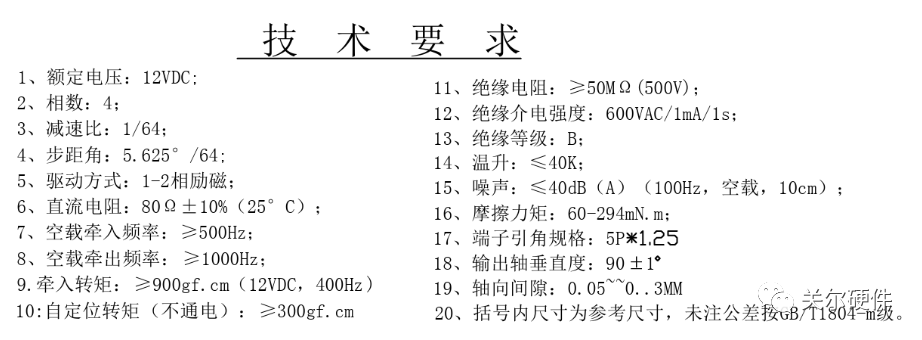
24BYJ28 model specification parameters:
1. Rated voltage: 12VDC
Indicates 12V DC power supply. The security shaking head machine uses a 5V adapter, and the stepper motors used are all 5V.
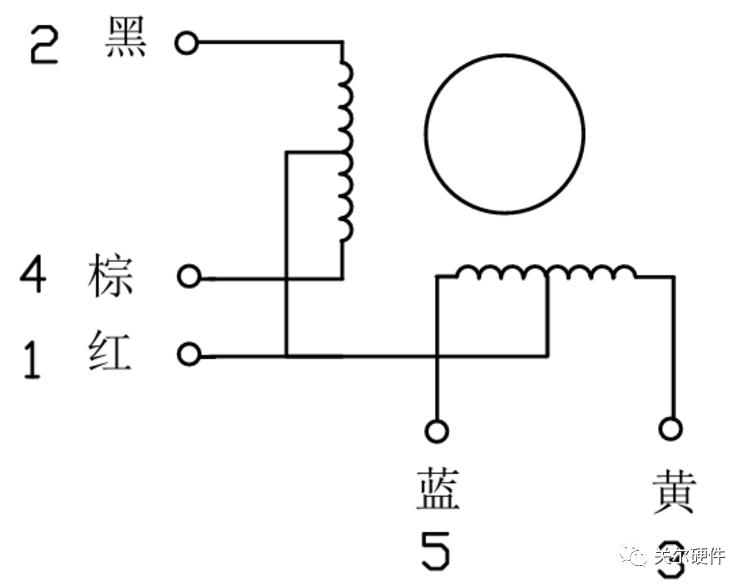
2. Number of phases: 4
The figure below shows 4 phases (4 coils, of which 1 red is the power supply, which is unipolar, and the current can only flow from pin 1 Flow to 2\3\4\5 feet):
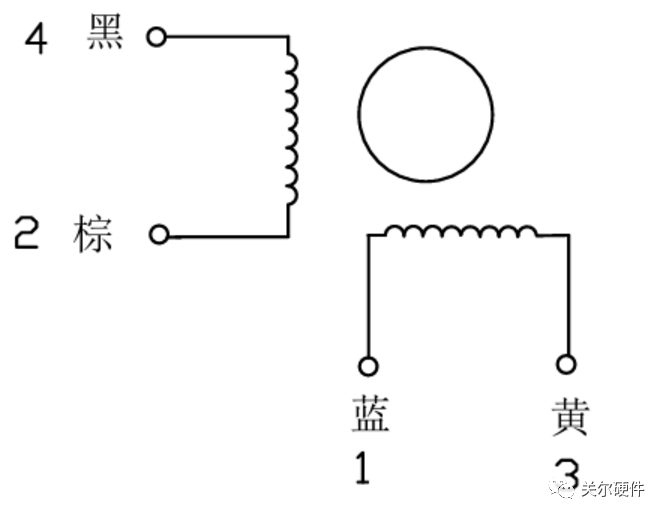
As shown in the figure below, it is 2-phase (2 coils, which are bipolar, and the current can flow from pin 4 to pin 2, or from pin 2 to pin 4):
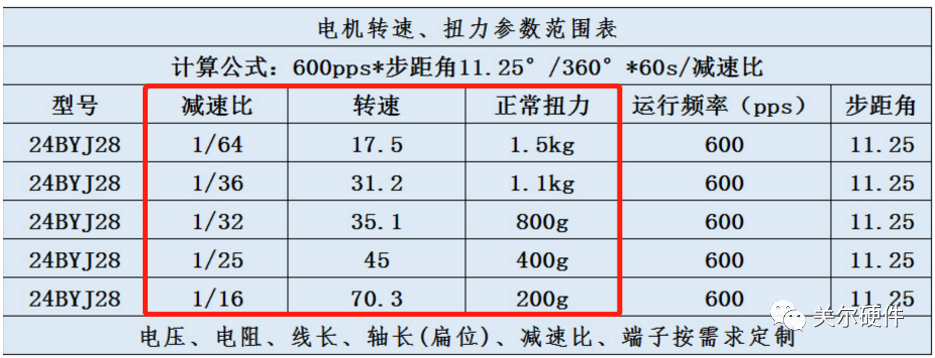
3. Reduction ratio: 1/64
Reduction ratio: step The ratio of the rotational speed between the motor output shaft and the load shaft. The larger the reduction ratio, the larger the torque and the slower the speed.
4. Step angle: 5.625° /64< /p>
5.625° indicates the step angle inside the motor;
64 indicates the reduction ratio.
5. Driving mode: 1-2 phase excitation unipolar drive
Unipolar drive: current can only flow in one direction.
6. Resistance: 80Ω±10%/ 25°C
Pay attention to the current value of the driver chip and the layout wiring. For example, the rated voltage is 12V, the resistance value is 80 ohms, and the current is 0.15A.
7. No-load pull-in frequency: ≥500Hz
No-load pull-in frequency refers to the pulse frequency at which the stepper motor can start normally from the locked state under no-load conditions.
If the pulse frequency is higher than the no-load start frequency, the stepper motor cannot start normally, and step loss or stalling may occur.
In the case of load, the starting frequency should be lower.
8. No-load pull-out frequency: ≥1000Hz
No-load pull-out frequency means that the stepper motor gradually increases the pulse frequency under normal operating conditions so that the stepper motor does not lose its step highest frequency.
When the stepper motor rotates, the inductance of each phase winding of the motor will form a back electromotive force; the higher the frequency, the greater the back electromotive force. Under its action, the phase current of the motor decreases as the frequency (or speed) increases, resulting in a decrease in torque.
9. Pull-in torque: ≥900gf.cm (12VDC, 400Hz)
Torque gf.cm: gram force.cm;
kgf=kg Force, kilogram force, is the main unit of force in the engineering unit system, meaning 1 kilogram of force;
900gf is about 0.9kg force;
10. Self-positioning torque ( No power supply): ≥300gf.cm
Self-positioning torque refers to the torque that the stator locks the rotor without power on, which is the so-called self-locking.
11. Insulation resistance: ≥50MΩ (500V)
12. Insulation dielectric strength: 600VAC/1mA/1s
13. Insulation class: B< /p>
Insulation level refers to the heat resistance level of the insulating material used in the motor (or transformer) winding.
A grade insulation temperature resistance 105℃
E grade insulation temperature resistance 120℃
B grade insulation temperature resistance 130℃
F Class insulation temperature resistance 155℃
H grade insulation temperature resistance 180℃
Y grade insulation temperature resistance 90℃
C grade insulation temperature resistance above 200℃< /p>
Within the allowable range and its grade, it is the heat resistance grade of the motor. If this limit is exceeded, the life of the insulating material will be shortened sharply, or even burned. This temperature limit is called the allowable temperature of the insulating material.
14. Temperature rise: ≤40K
The temperature rise is the difference between the working temperature of the motor and the ambient temperature, which is caused by the heat generated when the motor is running.
15. Noise: ≤40dB(A) (100Hz, no load, 10cm)
When the product has a microphone, the position of the microphone should be far away from the motor, otherwise the microphone will receive a lot of noise motor noise.
16. Friction torque: 60-294mN.m
17. Terminal pin specification: 5P*1.25
18. Output shaft verticality: 90± 1°
19. Axial clearance: 0.05~0.3mm
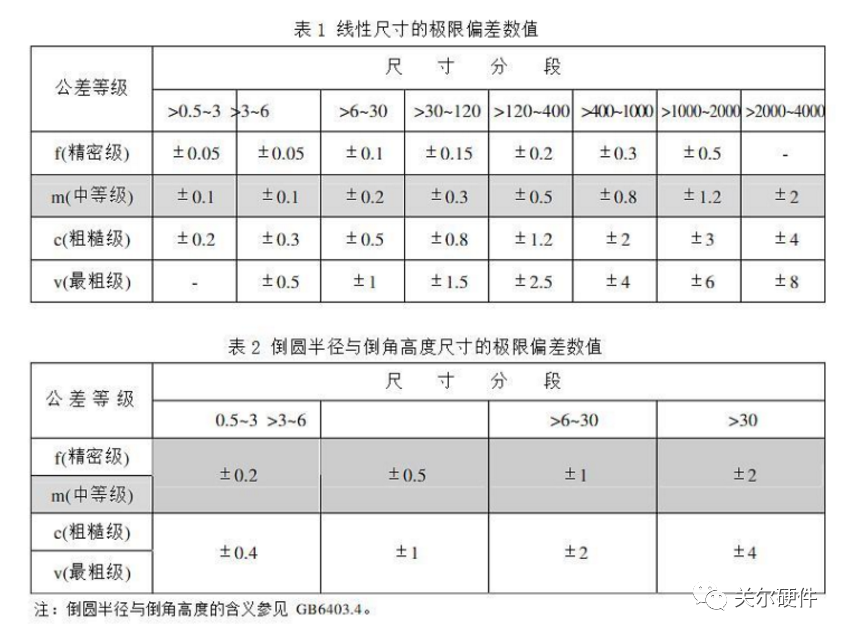
20. The dimensions in parentheses are reference dimensions, and the tolerances not marked are according to GB/T1804-m level
< p>GB/T1804 standard grade:
Precautions for use :
1. Products used outdoors in summer will reach a high temperature of 40°, and in winter the north will reach a low temperature of -40°. The product must be tested for high and low temperature. Especially at low temperature, the wire is relatively hard, and it is easy to break when turning. That is, low temperature and long-term rotation experiments must be verified.