-
Mail us
sale@tiger-transformer.com -
Phone us
(+86)15155183777 -



Mail us
sale@tiger-transformer.comPhone us
(+86)15155183777
DC/DC converter, as a very important part of the electric vehicle power system, one of its important functions is to provide the required power for the power steering system, air conditioner and other auxiliary equipment. The other type appears in the composite power system and is connected in series with the supercapacitor to regulate the output of the power supply and stabilize the bus voltage.
To supply power to the vehicle electrical system, the position of DCDC in the electric vehicle electrical system is shown in the figure below. Its electric energy comes from the power battery pack, and its destination is to supply power to the on-board electrical appliances.
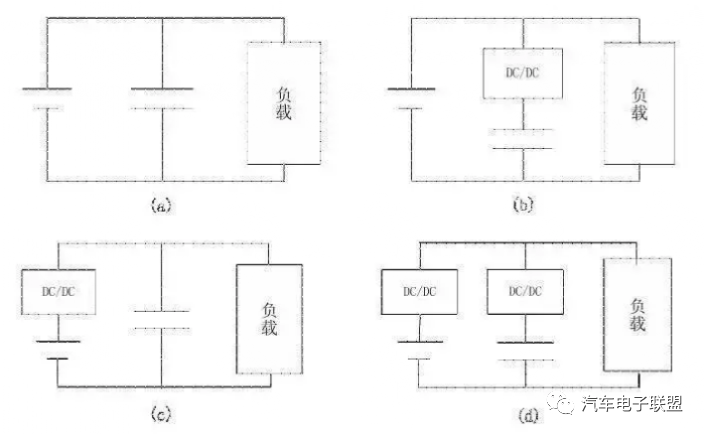
The position of the DCDC used in conjunction with the supercapacitor in the vehicle power supply is shown in the figure below. It may appear in the positions shown in figures (b), (c), and (d), while (b) is a form that is widely used.
DCDC classification and working principle
1.1 Isolated and non-isolated
What is electrical isolation?
A passage from Baidu: Electrical isolation is to electrically isolate the power supply from the electrical circuit, that is, to isolate the branch circuit that uses electricity from the entire electrical system, making it an electrically isolated Independent, independent ungrounded safety system to prevent indirect electrical contact hazards in the event of exposed conductor fault live. After the electrical isolation is achieved, there is no direct electrical connection between the two circuits. That is, the two circuits are insulated from each other. At the same time, it is necessary to ensure that the two circuits maintain the relationship of energy transmission. The role of electrical isolation is mainly to reduce mutual interference between two different circuits and reduce noise.
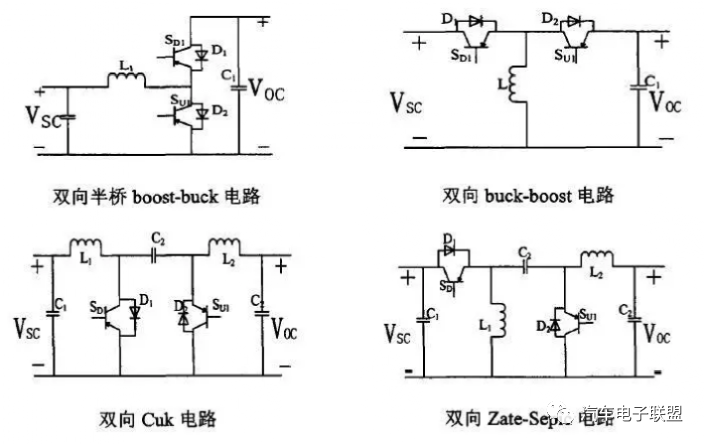
Non-isolated bidirectional DCDC, the structure is relatively simple, each component is directly connected, there is no additional energy loss, and the work efficiency is relatively high. The capacitor requirements on the boost side are relatively high. The main non-isolated DCDC circuit structures include bidirectional half-bridge boost-buck circuit, bidirectional buck-boost circuit, bidirectional buck circuit, and bidirectional Zate-Sepic circuit, as shown in the figure below.
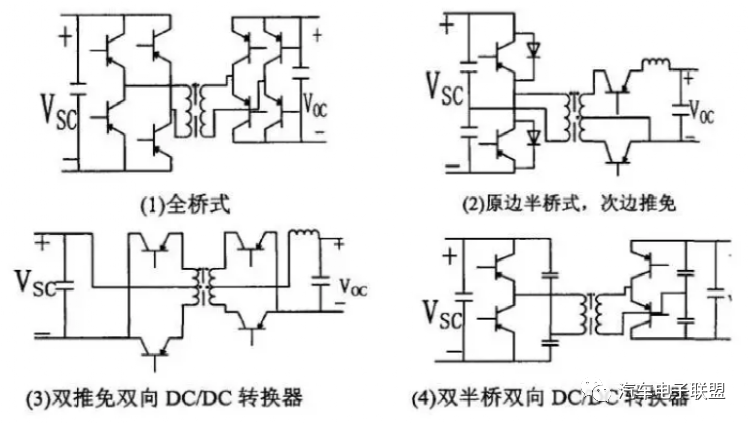
Isolated bidirectional DCDC, in non-isolated bidirectional DCDC On the basis of the converter, a high-frequency transformer is added to form an isolated bidirectional DC-DC converter. The circuit topology on both sides of the high-frequency transformer can be full-bridge, half-bridge, push-pull, etc. These types of isolated bidirectional DCDC converters use more power switches, have a large voltage ratio, and have the advantages of electrical isolation. However, this type of DCDC converter has a complex structure and relatively high cost, and the loss of the converter is high. At low frequencies, the iron core of the isolation transformer will be saturated, and the loss will further increase. Therefore, non-isolated bidirectional DCDC converters have more advantages than isolated ones in electric vehicles.
When energy flows from the high pressure side to the low pressure side, bi-directional The DCDC converter works in the BUCK mode; when the energy flows from the low voltage side to the high voltage side, the bidirectional DCDC converter works in the BOOST mode.
1.2 Three components of the DCDC system
The main circuit is also called the power module, which is the main body of the entire DCDC. A typical full-bridge DCDC converter main circuit topology is shown in the figure below.
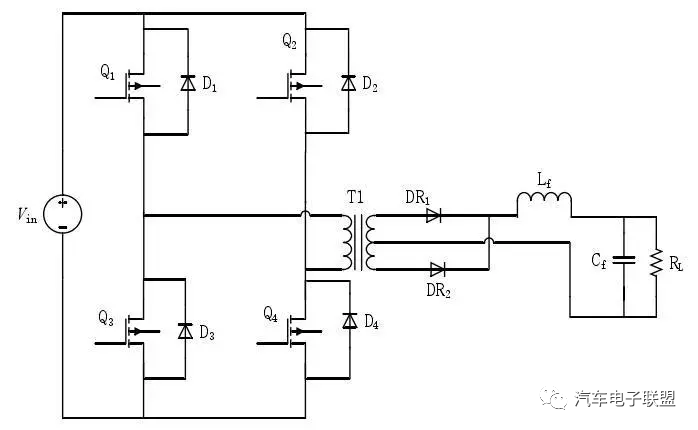
In the figure above, Vin is the input voltage and needs to pass The DCDC circuit obtains a required output voltage at the output terminal. The primary side switching circuit modulates the input current into a rectangular wave. This process mainly relies on the controller to modulate the PWM wave with a specific duty cycle to drive the four switching tubes to switch on and off according to the predetermined order and time, so as to realize the current inversion process. . The input voltage of the primary side can be adjusted by the duty cycle, the output voltage increases as the duty cycle increases, and the output voltage decreases as the duty cycle decreases. The frequency can be adjusted by adjusting the switching frequency. T1-bit transformer, variable than your n. The transformer can not only realize the electrical isolation, but also play the role of voltage regulation. A fixed number of turns of the primary side coil, and changing the number of turns of the secondary side can obtain different voltage levels. The input of the transformer is a pulsed rectangular wave obtained by inverting the left full bridge circuit, which is transmitted to the secondary side of the transformer to obtain an AC sine wave with another voltage amplitude. After being rectified by DR1 and DR2, it is filtered by Cf and Rl to obtain direct current and provide it to the output terminal.
Drive module
For the four-way PWM drive signal output by the control chip, it cannot directly drive four power switch tubes. Therefore, generally speaking, a switching power supply needs to be equipped with a driving circuit to drive the power switching tube.
There are many types of driving circuits, mainly the following three types:
Direct coupling type: each output PWM driving signal of the control chip drives the power through an amplifying circuit composed of two transistors turning tube. This method cannot realize the isolation of the control part and the main circuit.
Pulse transformer coupled drive circuit: This circuit is based on the direct coupling type with a pulse transformer added to realize the isolation of the control circuit and the main circuit. However, the disadvantage of this structure is that it is relatively complicated when it comes to the design and manufacture of the transformer.
Driving circuit of the driver chip: In order to drive the power switch tube more conveniently, many companies have developed the driver chip, which can output larger power and drive the switch tube, and with the miniaturization of the chip With the development, the current driver chip is very small in size and has various packaging forms. Using the driver chip to drive the power switch tube is relatively simple, but the isolation between the control circuit and the main circuit is still not achieved.
Control Module: There are three main control modes for the feedback of the main circuit: voltage control mode, peak current control mode, and average current control mode.
Voltage control mode: It belongs to voltage feedback, which uses the output voltage to correct. It is a single-loop feedback mode. The output voltage sampling is compared with the input reference voltage, and the obtained output signal is compared with a sawtooth wave voltage, and the PWM wave is output. Signal. The design and application of the voltage control mode are relatively simple, but the voltage control mode does not control the output current, there is a certain error, and the output voltage is filtered by the inductor and capacitor first, making the dynamic response relatively poor.
Peak current control mode: The difference between the peak current control mode and the voltage control mode is that in the peak current control mode, the sawtooth waveform of the voltage control mode is converted into the instantaneous current of the inductor and a small Superposition of sawtooth waves. But the instantaneous current of the inductor cannot represent the situation of the average current.
Average current control mode: It belongs to the double-loop control mode, and the output signal of the voltage loop is used as the reference current to compare with the feedback signal of the inductor current. Setting the error amplifier can average some high-frequency components of the input current, and then compare the averaged output current with the sawtooth wave generated by the chip to output a suitable PWM waveform.
Inductor current and capacitor voltage therefore require PID tuning for both variables. A typical control flow is shown in the figure below. The control module is composed of two PID controllers, which are the voltage control control outer loop and the current control inner loop. A reference voltage is given in the flow chart and reasonable parameters are designed to quickly achieve the purpose of the control system.
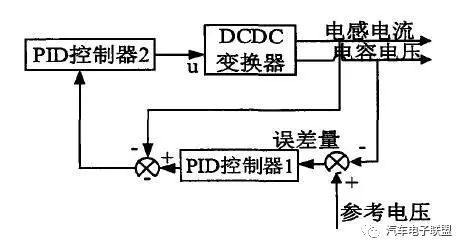
Compared with the three control methods, the average current control The method does not limit the duty cycle, and both the output voltage and the inductor current are fed back, which has a better control effect. When using the average current control method to design the feedback circuit, the current loop is regarded as a part of the voltage loop.
1.3 Soft switching and hard switching
What is the difference between hard switching and soft switching in DCDC? Hard switching and soft switching are for switching tubes.
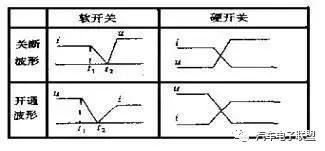
Hard switching is to forcibly turn on or turn off the switch tube regardless of the voltage or current on the switch tube (DS pole or CE pole). When the voltage and current on the switch tube (DS pole or CE pole) are large, the switch tube acts, because it takes a certain time to switch between the switch tube states (from on to off, or from off to on), which will cause There will be a crossover region between voltage and current within a certain period of time when switching between tube states, and the loss of the switching tube caused by this crossover is called the switching loss of the switching tube.
Soft switching means that by detecting the current of the switch tube or other technologies, the switch tube is turned on or off when the voltage at both ends of the switch tube or the current flowing through the switch tube is zero, so that the switch tube is There are no switching losses.
Generally speaking, the efficiency of soft switching is higher (because there is no switching loss); the operating frequency is higher, and the volume of PFC or transformer can be reduced, so the volume can be made smaller. But the cost is relatively high, and the design is more complicated.
Further, the soft switch includes three control methods: Bipolar control, limited bipolar control, phase-shifted full-bridge control, the obtained rectangular wave waveform is shown in the figure below.
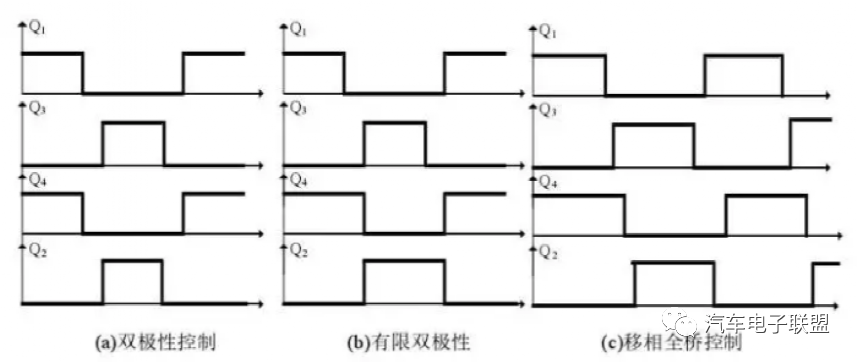
Q1 and Q3 are the switch tubes on the front bridge arm , belong to the same bridge arm, and Q1 and Q4 are diagonal switching tubes, which belong to two bridge arms respectively. The first control method is hard switch, the second and third can realize soft switch, but the third control method is more flexible and easier to realize.
Due to the higher and higher requirements for power density, the soft-switching DCDC that can improve power performance by increasing frequency is the main direction of current research. Soft switching includes three main control modes: ZVS phase-shifted full-bridge conversion, ZCS phase-shifted full-bridge conversion, and ZVZCS phase-shifted full-bridge conversion.
Estimated DCDC power
Each electrical equipment has its own rated voltage and rated current. It will greatly reduce the power conversion efficiency, damage the service life and even cause equipment damage.
Therefore, the specifications of the DCDC match the requirements of the system in order to better function. The general selection idea is not to directly add all the electrical power together, because they may not all work at the same time.
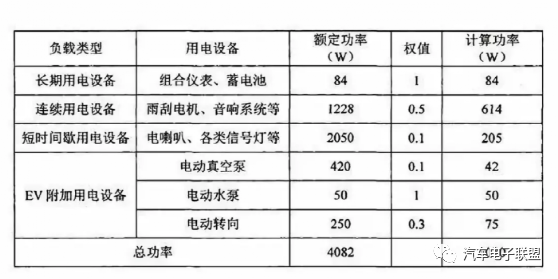
According to the different properties of the electronic equipment in the pure electric vehicle, the electrical equipment can be divided into long-term power consumption, continuous power consumption, short-term intermittent power consumption and additional power consumption equipment types, and assigned to different types weights. Among them, long-term electrical equipment includes instrument clusters and batteries, and the weight is 1;
Continuous electrical equipment includes wipers, motors, audio systems, and instrument lighting, and the weight is 0.5; short-term intermittent Electrical equipment includes electric horns, various signal lights, controllers and other equipment, and the weight can be 0.1; for additional electrical equipment, electric vacuum pumps, electric water pumps and electric steering, the weights are respectively 0.1, 1, and 0.3 according to the actual situation. The power consumption analysis of various equipment is shown in the table.
How does DCDC determine electrical parameters
In the composite power system, the supercapacitor is generally defined as a part that deals with high power. During the discharge process, it provides a part above the average value for the peak value of the working condition; during the braking energy recovery process, it undertakes the absorption of all or most of the recovered current .
In the face of impact power, DCDC has relatively high requirements in two aspects.
One is the response speed. In the power circuit where the battery and the supercapacitor are connected in parallel, the braking energy is generated from the motor and transmitted to the power supply through the bus. If the response of the DCDC is not sensitive enough and the connection time is long, the incoming energy will be isolated from the supercapacitor by the DCDC and cannot be absorbed, but can only be absorbed by the battery. Excessive power will cause permanent damage to the battery. .
Another requirement of DCDC is to be able to withstand the impact of instantaneous high power. The DCDC connected in series with the capacitor circuit needs to often face the working state of impact power. Therefore, the most important parameters for choosing a DCDC connected in series with a supercapacitor in the same branch are power range, operating voltage and operating time.