-
Mail us
sale@tiger-transformer.com -
Phone us
(+86)15155183777 -



Mail us
sale@tiger-transformer.comPhone us
(+86)15155183777
The motor starter is a device used to assist the motor to start. It can make the motor start smoothly, reduce the impact on the power grid, and can also realize the soft stop, brake, overload and phase loss protection of the motor.
1. Magnetic starter
1 The magnetic starter is based on an AC contactor combined with a thermal relay Composed of combined control appliances. It can control the start and stop of small and medium-sized three-phase squirrel-cage asynchronous motors through the operation of buttons, and has two structures: reversible and irreversible.
2 The magnetic starter itself can realize loss of voltage protection and overload protection. In order to achieve short-circuit protection, additional fuses are required. A knife switch for isolation should be installed in front of the starter.
3 The magnetic starter is composed of a steel stamping shell, a steel bottom plate, an AC contactor, a thermal relay and corresponding wiring. It should be equipped with a start-stop button switch when in use , and connect the manual signal cable correctly. The metal shell and bracket of the magnetic starter should be protected to zero or grounded.
4, the working principle of the magnetic starter
Press the start button, the AC contactor coil built in the magnetic starter is energized, and the armature drives the contact The group is closed, the motor power is turned on, and at the same time, it is self-locked through the auxiliary contact. Press the stop button, the internal AC contactor coil is de-energized, the contacts are disconnected, the motor power is cut off and unlocked.
5 According to different control needs, the magnetic starter can also be wired flexibly, so that it can realize functions such as inching and switching. The built-in thermal relay provides overload protection for the controlled motor, and the setting current of the thermal relay should meet the power requirements of the motor.
6 The magnetic starter belongs to full-voltage direct start, and it is used when the full-voltage direct start is allowed in both grid capacity and load. The advantages are convenient operation and control, simple maintenance, and relatively economical. It is mainly used for starting small power motors, and this method is not suitable for motors larger than 11kw.
Second, decompression starter
The squirrel-cage motor whose capacity is more than 10kW or whose capacity accounts for more than 20% of the transformer capacity has a large starting current, so A decompression starter should be used to reduce the voltage applied to the stator windings. After the motor is started, the voltage is raised to the rated value to make it run normally.
1. Ya-△starter
1) Ya-△start
For normal operation, the stator winding is in the shape of △ For the connected squirrel-cage three-phase asynchronous motor, if the stator winding is connected into a Y shape when starting, and then connected into a △ shape after starting, the starting current can be reduced and the impact of the motor on the grid can be reduced. This starting method is called star-delta decompression starting, or Y-△ starting for short.
2) Ya-△start working principle
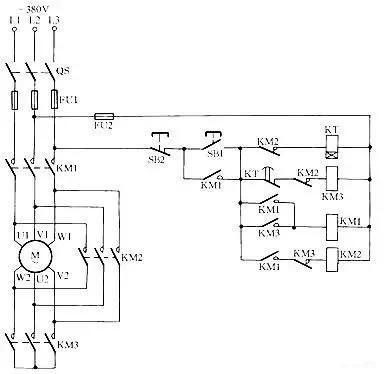
As shown in the figure above, when the button SB1 is pressed, the time relay KT and the contactor KM3 are energized, and KM3 pulls in to connect the motor winding into a Y shape, and at the same time its normally open auxiliary contact closes to make KM1 energize and pull in, The motor is started with Y-connection. After a certain time delay, after the motor is started, the time relay KT normally closed contact is delayed and disconnected, so that KM3 is de-energized and released, and at the same time, the normally closed auxiliary contact of KM3 is closed to make KM2 energized and closed, and the motor changes to a △ shape Connection operation.
3) Advantages of ya-△starting mode
(1) The starting current is 1/3 of that of direct starting, and the impact on the power grid is small.
(2) Ya-△ starter has simple structure and low price.
(3) When the load is light, the motor can be operated under the Y-shaped connection, so as to realize the matching between the rated torque and the load, and improve the operating efficiency of the motor.
(4) There is no need to add start-up equipment, it can be realized with control equipment such as start switch and AC contactor.
4) Disadvantages of Y-△starting mode
(1) It can only be used for motors with △-shaped connection.
(2) It is only suitable for small asynchronous motors of 4~100kW.
(3) When the stator winding is connected in Y-shape, the starting torque is reduced to 1/3 of that in △-shape connection, so it cannot start with heavy load.
2. Resistive decompression starter
1) Resistive decompression start
When the motor starts, connect it in series in the motor circuit An appropriate resistor, due to the voltage drop on the resistor, the voltage applied to the stator winding is lower than the power supply voltage; when the motor accelerates, the motor current decreases, and the voltage drop on the resistor also decreases, and the motor terminal voltage As a result, the voltage and torque of the motor gradually increase to achieve smooth acceleration of the motor; when the motor is close to the rated speed and completes the start, the series resistor is short-circuited, and the voltage at the motor terminal becomes the line voltage, that is, it operates normally at the rated voltage . This starting method is called resistance decompression starting.
2) Working principle of resistance decompression start
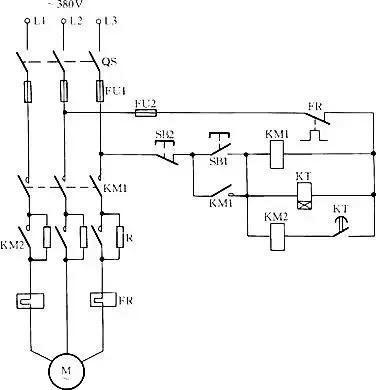
As shown in the figure above, press the start button SB1, the contactor KM1 and the time relay KT are energized, KM1 is attracted and self-locked, and the stator winding of the motor is connected in series with a resistor to start it. After a certain delay, after the motor is started, the time relay KT normally open delay closed contact is closed, KM2 is energized, and its main contact is closed to short-circuit the resistor, the motor stator winding is supplied with the full voltage of the power supply, and the starting process is over .
3) The resistance decompression starter has manual control, contactor control and time relay control. The starting resistor is generally made of cast iron resistor, because of its large power, it can pass a large current and generate enough torque to make the motor start to rotate from a standstill.
4) Because the greater the current, the greater the voltage drop on the starting resistor, so the voltage drop on the motor at the moment of starting is relatively large, which reduces the starting torque of the motor a lot. Therefore, the resistance decreases Voltage starters are only suitable for light-load starting motors.
3. Autodecompression starter
1) Autodecompression starter, also known as compensator, uses an autotransformer to reduce the starting voltage to achieve the purpose of limiting the starting current.
2) Working principle of self-coupling decompression start
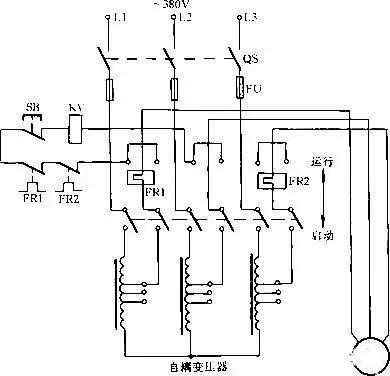
As shown in the figure above, when starting the motor, push the tool handle to the starting position, and at this time the three-phase AC power is connected to the motor through an autotransformer. After the start-up is completed, pull the tool handle to the running position to cut off the autotransformer, so that the motor is directly connected to the three-phase power supply, and the motor runs normally. At this time, the pull-in coil KV is energized and pulls in, and the knife handle is kept in the running position through the interlocking mechanism. When stopping, press the SB button.
3) The auto-decompression starter is composed of autotransformer, protection device, contact system and handle operating mechanism. The tap voltage of the autotransformer is 65% and 80% of the power supply voltage, which can be selected according to the load at startup. The coil is designed for short-term energization and can only be started twice in a row.
4) The auto-coupling decompression starter is equipped with overload protection and undervoltage protection.
(1) Overload protection is protected by a bimetal thermal relay.
(2) The undervoltage protection adopts the undervoltage release. The voltage-loss release is composed of a coil, an iron core and an armature, and the coil is connected between two phases. When the power supply voltage is normal, the coil is energized to make the iron core attract the armature; when the power supply voltage drops below 85% of the rated voltage, the suction force of the iron core decreases, and the armature falls. Too low and burnt. When the power is suddenly cut off, the compensator will also trip to prevent the motor from starting at full voltage when the power is restored.
3. Frequency sensitive rheostat
1. Frequency sensitive rheostat start
Frequency sensitive rheostat start It is a method of starting by connecting a frequency-sensitive rheostat in series in the rotor circuit of a wound-type motor. The frequency-sensitive rheostat is actually a reactor with a very large iron core loss, and its iron core is made of several 30-50mm thick cast iron plates or steel plates. The three-phase winding of the frequency-sensitive rheostat is generally connected into a Y shape, and connected to the rotor of the motor through the terminal.
2, Frequency sensitive rheostat start working principle
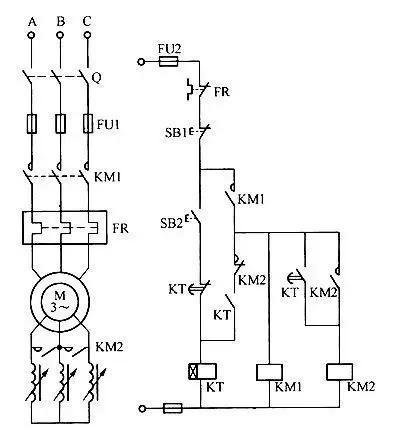
As shown in the figure above, press the start button SB2, the time relay KT is energized and closed, and its normally open contact makes KM1 energized and self-locked, and the motor stator winding is powered on. The rotor is connected to the frequency sensitive rheostat to start. As the motor speed rises steadily, the impedance of the frequency-sensitive rheostat gradually decreases. When the speed rises to close to the rated speed, the delay time of the time relay KT is up, and its delay-closed normally-open contact is closed, so that KM2 is energized and self-locked , short-circuit the frequency-sensitive rheostat, and the motor enters normal operation; at the same time, the delay-off normally closed contact of KT is disconnected, the normally closed contact of KM2 is disconnected, and the self-locking circuit before KT is cut off, so that KT is powered off and released.
3. In the initial stage of motor starting, due to the high frequency of rotor current, the impedance of the frequency-sensitive rheostat (mainly the equivalent resistance of iron consumption) is relatively large, which limits the starting current. As the rotor speed increases, the frequency of the rotor current decreases gradually, and the equivalent resistance of the iron loss of the frequency-sensitive rheostat also decreases, which is equivalent to gradually reducing the resistance of the rotor circuit during the starting process. After the start-up process is over, the frequency of the rotor current is very low, and the impedance of the frequency-sensitive rheostat is very small. At this time, it can be cut off and the rotor winding is directly short-circuited. Frequency-sensitive rheostats are designed for short-time work and cannot work for a long time.
4 When designing a frequency-sensitive rheostat, properly select the equivalent resistance reflecting the core loss and the reactance value of the core coil to obtain a larger value close to Mechanical characteristics of constant starting torque. For motors with larger capacity, multiple frequency-sensitive rheostats can also be used in series and parallel combinations.
5 When selecting frequency-sensitive rheostats, attention should be paid to the different types of infrequently starting light-load type, heavy-load type and intermittent start-up. The frequency-sensitive rheostat start is a non-contact rheostat start, which can automatically and steplessly reduce the resistance, avoiding the current impact and torque impact when the rotor string resistance is cut off step by step, and greatly simplifying the control system. The frequency-sensitive rheostat has a simple starting structure, reliable operation, and convenient use and maintenance.
Fourth, soft starter
1 The soft starter is a combination of soft parking, light load energy saving and multi- A novel motor control device with protection functions integrated. Its main components are three-phase parallel thyristors connected in series between the power supply and the controlled motor and their electronic control circuits. The soft starter can effectively limit the starting current of the AC asynchronous motor when starting, and can be widely used in loads such as fans, water pumps, transportation and compressors. Ideal replacement product for step-down equipment.
2, the working principle of the soft starter
The soft starter uses three-phase parallel thyristors as voltage regulators, which are connected between the power supply and the motor stator between. When starting the motor, the output voltage of the thyristor gradually increases, and the motor gradually accelerates until the thyristor is fully turned on, and the motor works on the mechanical characteristics of the rated voltage to achieve smooth start, reduce the starting current, and avoid starting overcurrent tripping. When the motor reaches the rated speed, the starting process is over, and the soft starter automatically replaces the thyristor that has completed the task with a bypass contactor to provide the rated voltage for the normal operation of the motor, so as to reduce the heat loss of the thyristor and prolong the service life of the soft starter. Improve its work efficiency, and make the power grid avoid harmonic pollution. The soft starter also provides a soft stop function. The soft stop is the opposite of the soft start process. The voltage is gradually reduced, and the number of revolutions is gradually reduced to zero, so as to avoid the torque impact caused by free stop.
3, the role of the soft starter
1) reduce the starting current of the motor, reduce the distribution capacity, and avoid capacity increase investment;
2) Reduce starting stress and prolong the service life of motors and related equipment;
3) Smooth start and soft stop avoid the surge problem and water hammer effect of traditional starting equipment;
4) A variety of start-up modes and a wide range of current and voltage settings can adapt to various load conditions and improve the process;
5) Perfect and reliable protection functions, more effective protection The safety of motors and related equipment;
6) It can be used in occasions where frequent starts and stops.
Five, Inverter
1 Inverter is the modern motor control field with the highest technical content and the most complete control functions. The motor control device with the best control effect, it adjusts the speed and torque of the motor by changing the frequency of the grid. Because it involves power electronic technology and microcomputer technology, the cost is high and the requirements for maintenance technicians are also high, so it is mainly used in fields that require speed regulation and have high requirements for speed control.
2 When the motor is directly started with a power frequency power supply, the starting current is 47 times the rated current, which will cause mechanical and electrical shocks. The inverter can be used to start smoothly, the starting current is 1.21.5 times of the rated current, and the starting torque is 70%~120% of the rated torque; The torque is more than 100%, and it can start with full load.